[Scienza delle Costruzioni] Incastri cedevoli Telai
Buonasera!
Se in un telaio i nodi più esterni hanno degli incastri cedevoli alla rotazione cosa accade? E con il metodo degli spostamenti come devo impostare il problema?
Una domanda simile è stata fatta ad un ragazzo agli esami orali di SdC ma non sono riuscita a capire perché la distanza era troppa.
E se gli incastri cedevoli fossero stati interni?
Se in un telaio i nodi più esterni hanno degli incastri cedevoli alla rotazione cosa accade? E con il metodo degli spostamenti come devo impostare il problema?
Una domanda simile è stata fatta ad un ragazzo agli esami orali di SdC ma non sono riuscita a capire perché la distanza era troppa.
E se gli incastri cedevoli fossero stati interni?
Risposte

Beh dipende da come è il telaio.
Ad esempio se avessimo la traslazione orizzontale impedita e cedessero anelasticamente gli incastri alla base avresti delle deformate tipo trave incastrata incastrata con incastro che cede alla rotazione.
Ad esempio se avessimo la traslazione orizzontale impedita e cedessero anelasticamente gli incastri alla base avresti delle deformate tipo trave incastrata incastrata con incastro che cede alla rotazione.
Ciao! Grazie per la risposta. Comunque immaginavo una situazione di questo tipo : 
In realtà non ho visto di preciso cosa ha chiesto il professore all'esame orale ma credo fosse una situazione di questo tipo.
Nel vettore degli spostamenti cosa mettiamo?
Cioè come studio questa molla cedevole? Cosa comporta?
In realtà non ho visto di preciso cosa ha chiesto il professore all'esame orale ma credo fosse una situazione di questo tipo.
Nel vettore degli spostamenti cosa mettiamo?
Cioè come studio questa molla cedevole? Cosa comporta?
Avevo capito male la questione, con incastri cedevoli pensavo si intendesse cedimenti anelastici imposti.
Tuttavia in quest'altra situazione avendo degli incastri cedevoli elasticamente, se si vuol pensare di risolvere la struttura mediante il metodo degli spostamenti si possono bloccare tutti gli spostamenti della struttura, quindi può essere inserito un morsetto anche nell'incastro che cede elasticamente alla rotazione ed avrai come condizione di equilibrio che il momento in quel nodo deve essere pari alla rigidezza per la rotazione, in formule:
$M_i=-K_phi*phi_i$
Tuttavia in quest'altra situazione avendo degli incastri cedevoli elasticamente, se si vuol pensare di risolvere la struttura mediante il metodo degli spostamenti si possono bloccare tutti gli spostamenti della struttura, quindi può essere inserito un morsetto anche nell'incastro che cede elasticamente alla rotazione ed avrai come condizione di equilibrio che il momento in quel nodo deve essere pari alla rigidezza per la rotazione, in formule:
$M_i=-K_phi*phi_i$
Grazie mille per la risposta, avevo già pensato a questa ipotesi ma non ero sicura.
Quindi il vettore u è dato comunque dalle rotazioni dei nodi e dalle traslazioni degli impalcati però nel vettore F0 in corrispondenza di quel nodo (dove ho l'incastro cedevole) devo mettere \( M= -K\varphi \). Ma in tal caso \( \varphi \) per me rimane una incognita o sbaglio? Oppure devo risolvere il problema normalmente e alla fine impongo l'equazione di M?
Come mai il segno è negativo? Immagino sia perchè questo momento per la struttura è come se fosse un momento stabilizzante...
Possono esserci altri casi "strani"? Condizioni particolari?
Quindi il vettore u è dato comunque dalle rotazioni dei nodi e dalle traslazioni degli impalcati però nel vettore F0 in corrispondenza di quel nodo (dove ho l'incastro cedevole) devo mettere \( M= -K\varphi \). Ma in tal caso \( \varphi \) per me rimane una incognita o sbaglio? Oppure devo risolvere il problema normalmente e alla fine impongo l'equazione di M?
Come mai il segno è negativo? Immagino sia perchè questo momento per la struttura è come se fosse un momento stabilizzante...
Possono esserci altri casi "strani"? Condizioni particolari?
Il meno l'ho messo solo per una ragione fisica, ovvero che la forza elastica è opposta allo spostamento, non per altro ed in questo caso sì, $phi$ và comunque calcolato, è un'incognita del problema.
Di casi "strani" non saprei, bisogna vedere cosa si intende per strano; diciamo che potresti avere anche cedimenti anelastici come ho scritto prima ma anche variazioni termiche, aste assialmente estensibili ecc...
Di casi "strani" non saprei, bisogna vedere cosa si intende per strano; diciamo che potresti avere anche cedimenti anelastici come ho scritto prima ma anche variazioni termiche, aste assialmente estensibili ecc...
Ok, capito. Ma come calcolo quella rotazione ?
Per aste estensibili e variazioni termiche non dovrei avere problemi.
Le variazioni termiche le tratto nel vettore R0 come carico all'asta invece le aste assialmente deformabili hanno un approccio diverso, più spedito Secondo me.
Le variazioni termiche le tratto nel vettore R0 come carico all'asta invece le aste assialmente deformabili hanno un approccio diverso, più spedito Secondo me.
"octopus93":
Ok, capito. Ma come calcolo quella rotazione ?
La rotazione la calcoli andando a risolvere il sistema scritto con la matrice delle rigidezze
Scusami, forse sembro stupida...
ho immaginato un caso banale di questo tipo:
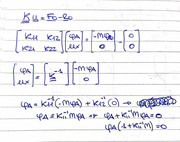
come vedi, quando voglio determinare \( \varphi \)A ottengo una cosa del genere, cioè uguale a zero. sicuramente sbaglio qualcosa
ho immaginato un caso banale di questo tipo:
come vedi, quando voglio determinare \( \varphi \)A ottengo una cosa del genere, cioè uguale a zero.
"octopus93":
Scusami, forse sembro stupida...
ho immaginato un caso banale di questo tipo:
come vedi, quando voglio determinare \( \varphi \)A ottengo una cosa del genere, cioè uguale a zero.
Non mi è chiaro quello che hai scritto, non capisco perché il termine con $phi_A$ "vada" nel termine noto.
Diciamo che il termine $k$ della molla dovrebbe sommarsi al termine sulla diagonale relativo alla rotazione $phi_A$, quindi nel tuo caso al termine con $K_11$
Perchè ho immaginato che un momento su quel nodo \( M= K*\varphi A \)
Quindi da quello che dici tu, dovrei mettere la rigidezza della molla nella matrice K (dovrebbe essere nota), \( \varphi A \) è l'incognita ed M?
Se non ti chiedo troppo, potresti postarmi la matrice o un esempio?
Quindi da quello che dici tu, dovrei mettere la rigidezza della molla nella matrice K (dovrebbe essere nota), \( \varphi A \) è l'incognita ed M?
Se non ti chiedo troppo, potresti postarmi la matrice o un esempio?
"octopus93":
Perchè ho immaginato che un momento su quel nodo \( M= K*\varphi A \)
Quindi da quello che dici tu, dovrei mettere la rigidezza della molla nella matrice K (dovrebbe essere nota), \( \varphi A \) è l'incognita ed M?
Se non ti chiedo troppo, potresti postarmi la matrice o un esempio?
Allora prima di fare un esempio vediamo se risolviamo così.
In linea generale quando scrivi le equazioni di equilibrio per una data struttura, andrai a scrivere qualcosa del tipo:
$R_i=0$
$M_j=0$
avendo indicato con $i$ e $j$ due nodi generici dove sono stati inseriti dei vincoli per bloccare gli spostamenti nodali.
Se nel nodo "j"-esimo abbiamo una molla che reagisce elasticamente alle rotazioni dovremo scrivere:
$M_j=M_0+delta_1M_1+delta_2M_2+...+delta_iM_i+phi_jM_j=-kphi_j$ poiché per quel nodo la coppia applicata non sarà nulla ma pari alla reazione della molla.
Ovviamente con $delta_1 delta_2 ... $ ho indicato gli eventuali cedimenti dei vincoli aggiunti alla struttura.
Ora nell'equazione del momento $M_j$ il termine $-kphi_j$ passa a sinistra dell'equazione in quanto $phi_j$ è una delle incognite del problema mentre $k$ è noto.
Non credo di aver capito del tutto, forse sono stanca  magari riguarderò domani...
magari riguarderò domani...
Comunque grazie davvero!
magari riguarderò domani...Comunque grazie davvero!
Buongiorno! Con Ri intendi le azioni taglianti?
"octopus93":
Buongiorno! Con Ri intendi le azioni taglianti?
Si, generiche azioni, per un telaio visto che non può traslare verticalmente sono solamente le azioni taglianti, se avessimo una struttura ancor più generica e si aggiungono vincoli per bloccare eventuali movimenti verticali sarebbero incluse anche quest'ultime
Grazie!
Quindi se ho capito bene, dove aver trovato il vettore u, moltiplico ogni spostamento trovato per il Ki corrispondente trovando la vera "azione" bloccata, M o T che sia e sarà lì che imposterò l'equazione M= ....= \( -K\varphi \)
Quindi se ho capito bene, dove aver trovato il vettore u, moltiplico ogni spostamento trovato per il Ki corrispondente trovando la vera "azione" bloccata, M o T che sia e sarà lì che imposterò l'equazione M= ....= \( -K\varphi \)
Si, il momento dell'incastro cedevole elasticamente alla rotazione sarà ovviamente la sua rigidezza per la rotazione che il nodo subisce, rotazione che calcoli dal vettore delle incognite avendo impostato il metodo degli spostamenti.
Grazie mille!

 Accedi a tutti gli appunti
Accedi a tutti gli appunti
 Tutor AI: studia meglio e in meno tempo
Tutor AI: studia meglio e in meno tempo