Dubbio su polo dei momenti e momento d'inerzia.

Salve gente, vi porgo il mio dubbio:
$L_{o(z)} = I_z\omega \implies M_{o(z)}^{ext} = I_z\alpha$
Qui sorge il mio dubbio: nel caso specifico, come si sceglie quale momento d'inerzia inserire in quella relazione?
Mi spiego meglio: supponete di avere una ruota che compie un moto di rotolamento puro: in tal caso ci sono due possibili scelte convenienti per calcolare i momenti delle forze esterne, che sono il centro di massa stesso (centro geometrico per omogeneità di distribuzione delle masse) e il punto di contatto tra la superficie e la ruota. Nel primo caso si annullano i momenti della reazione vincolare (parallelismo col braccio) e della forza peso della ruota (per nullità del braccio), nel secondo caso si annullano i momenti della reazione vincolare e forza di attrito statico per nullità del braccio. Se scelgo di riferire i momenti al centro di massa allora ovviamente utilizzerò in quella relazione il momento d'inerzia è quello relativo al centro di massa ($I_{cm} = \frac{MR^2}{2}$). Se invece decido di calcolare i momenti delle forze relativamente al punto di contatto dovrei usare il teorema di Huygens-Steiner e mettere nella relazione $I = I_{cm} + MR^2 = \frac{3MR^2}{2}$.
La cosa mi sembra strana, perché in effetti la ruota non sta ruotando rispetto al punto di contatto ma rispetto al centro di massa, indipendentemente dal punto che scelgo. Per cui mi sto chiedendo, che relazione esiste tra il momento d'inerzia che devo inserire nell'equazione, e il punto che io scelgo per il calcolo dei momenti?
Sto impazzendo...
$L_{o(z)} = I_z\omega \implies M_{o(z)}^{ext} = I_z\alpha$
Qui sorge il mio dubbio: nel caso specifico, come si sceglie quale momento d'inerzia inserire in quella relazione?
Mi spiego meglio: supponete di avere una ruota che compie un moto di rotolamento puro: in tal caso ci sono due possibili scelte convenienti per calcolare i momenti delle forze esterne, che sono il centro di massa stesso (centro geometrico per omogeneità di distribuzione delle masse) e il punto di contatto tra la superficie e la ruota. Nel primo caso si annullano i momenti della reazione vincolare (parallelismo col braccio) e della forza peso della ruota (per nullità del braccio), nel secondo caso si annullano i momenti della reazione vincolare e forza di attrito statico per nullità del braccio. Se scelgo di riferire i momenti al centro di massa allora ovviamente utilizzerò in quella relazione il momento d'inerzia è quello relativo al centro di massa ($I_{cm} = \frac{MR^2}{2}$). Se invece decido di calcolare i momenti delle forze relativamente al punto di contatto dovrei usare il teorema di Huygens-Steiner e mettere nella relazione $I = I_{cm} + MR^2 = \frac{3MR^2}{2}$.
La cosa mi sembra strana, perché in effetti la ruota non sta ruotando rispetto al punto di contatto ma rispetto al centro di massa, indipendentemente dal punto che scelgo. Per cui mi sto chiedendo, che relazione esiste tra il momento d'inerzia che devo inserire nell'equazione, e il punto che io scelgo per il calcolo dei momenti?
Sto impazzendo...
Risposte

[hide="."]Che c'entra che hai studiato, tutti sono bravi a studiare, non basta studiare due definizioni e dimostrazioni a memoria, le cose vanno capite.[/hide]
Ecco appunto. Ho postato la domanda per capire, il ché viene dopo aver studiato, salvo venire insultato e accusato di essere un nullafacente che 'tenta a caso'
Per la precisione, se ti leggi le dimostrazioni (che conosco e so ricostruire, non a memoria), il momento d'inerzia è quello relativo all'asse di rotazione, il quale non cambia (sbaglio?) in base alla scelta del polo (scelto istantaneamente fermo per comodità). Tuttavia se scelgo un polo per un disco che si muove di rotolamento puro coincidente con il punto di contatto devo riferire il momento ad un asse parallelo a quello per il centro di massa e passante per il punto stesso. Da dove si evince nella teoria?
Per la precisione, se ti leggi le dimostrazioni (che conosco e so ricostruire, non a memoria), il momento d'inerzia è quello relativo all'asse di rotazione, il quale non cambia (sbaglio?) in base alla scelta del polo (scelto istantaneamente fermo per comodità). Tuttavia se scelgo un polo per un disco che si muove di rotolamento puro coincidente con il punto di contatto devo riferire il momento ad un asse parallelo a quello per il centro di massa e passante per il punto stesso. Da dove si evince nella teoria?
Come detto, la velocità angolare la possiamo applicare dove la vogliamo, qualsiasi asse parallelo alla velocità angolare fatto passare per qualche punto del corpo PUO' essere considerato asse di rotazione ai fini del calcolo di energia cinetica, momento angolare e delle equazioni cardinali, solo che fare questo non sempre conviene.
Quando il corpo possiede un PUNTO FISSO (o asse fisso, nel caso piano l'asse fisso corrispondente è quello passante per il punto fisso e ortogonale al foglio), allora la cosa più semplice è far passare l'asse di rotazione in quel punto (che è anche il concetto intuitivo di rotazione, se uno vede una sbarretta imperniata in un suo punto, dice giustamente che la barretta ruota attorno a quel punto). Quando siamo in queste condizioni possiamo scrivere $K=1/2I_Oomega^2$, dove $I_O$ è il momento di inerzia rispetto a quel punto fisso O. La dimostrazione è semplice, se il punto O è fisso (fisso sempre oppure solo istantaneamente come nel puro rotolamento), la velocità di un punti i generico è $v_i=omegad_i$, dove d_i è la distanza del punto i da O.
Sommando si ha $K=1/2summ_id_i^2omega^2=1/2I_Oomega^2$
Sapendo che vale il teorema di Konig si ha anche: $ K=1/2I_Gomega^2+1/2Mv_G^2$, dove il pedice G si riferisce al centro di massa.
Con il teorema di Konig abbiamo fatto passare l'asse di rotazione nel centro di massa G (proprio quello che dicevo prima, anche se il corpo sta ruotando con un punto fisso O, niente ci viete di vedere la rotazione attorno a un qualsiasi altro punto) e il teorema dice essenzialmente che l'energia cinetica totale è pari a quella del centro di massa e quella relativa al centro di massa (infatti se ti metti nel centro di massa, i vari punti hanno velocità $v_i=omegar_i$, dove r_i è la loro distanza dal centro di massa, sommando ottieni lo stesso risultato di prima ossia $1/2I_Gomega^2$).
Il teorema di Konig vale sempre, qualsiasi moto faccia il sistema (nel caso do rotolanento con strisciamento il punto di contatto non è fermo quindi l'unica cosa che si può fare è scrivere l'energia cineica con Konig per esempio).
Quando il corpo possiede un punto fisso O, le scritture $K=1/2I_Oomega^2$ e $K=1/2I_Gomega^2+1/2Mv_G^2$ sono ovviamente uguali.
Infatti, se il punto O è fisso (fisso sempre oppure istantaneamente) la velocità del centro di massa sarò $v_G=omegad_G$, dove d_G è la distanza del centro di massa dal punto O, inserendola nel teorema di Konig si ha:
$K=1/2I_Gomega^2+1/2M(omegad_G)^2=1/2(I_G+Md_G^2)omega^2=1/2I_Oomega^2$
Avendo sfruttato il fatto che $I_O=I_G+Md_G^2$ dal teorema di huygens-steiner.
Quando il corpo possiede un PUNTO FISSO (o asse fisso, nel caso piano l'asse fisso corrispondente è quello passante per il punto fisso e ortogonale al foglio), allora la cosa più semplice è far passare l'asse di rotazione in quel punto (che è anche il concetto intuitivo di rotazione, se uno vede una sbarretta imperniata in un suo punto, dice giustamente che la barretta ruota attorno a quel punto). Quando siamo in queste condizioni possiamo scrivere $K=1/2I_Oomega^2$, dove $I_O$ è il momento di inerzia rispetto a quel punto fisso O. La dimostrazione è semplice, se il punto O è fisso (fisso sempre oppure solo istantaneamente come nel puro rotolamento), la velocità di un punti i generico è $v_i=omegad_i$, dove d_i è la distanza del punto i da O.
Sommando si ha $K=1/2summ_id_i^2omega^2=1/2I_Oomega^2$
Sapendo che vale il teorema di Konig si ha anche: $ K=1/2I_Gomega^2+1/2Mv_G^2$, dove il pedice G si riferisce al centro di massa.
Con il teorema di Konig abbiamo fatto passare l'asse di rotazione nel centro di massa G (proprio quello che dicevo prima, anche se il corpo sta ruotando con un punto fisso O, niente ci viete di vedere la rotazione attorno a un qualsiasi altro punto) e il teorema dice essenzialmente che l'energia cinetica totale è pari a quella del centro di massa e quella relativa al centro di massa (infatti se ti metti nel centro di massa, i vari punti hanno velocità $v_i=omegar_i$, dove r_i è la loro distanza dal centro di massa, sommando ottieni lo stesso risultato di prima ossia $1/2I_Gomega^2$).
Il teorema di Konig vale sempre, qualsiasi moto faccia il sistema (nel caso do rotolanento con strisciamento il punto di contatto non è fermo quindi l'unica cosa che si può fare è scrivere l'energia cineica con Konig per esempio).
Quando il corpo possiede un punto fisso O, le scritture $K=1/2I_Oomega^2$ e $K=1/2I_Gomega^2+1/2Mv_G^2$ sono ovviamente uguali.
Infatti, se il punto O è fisso (fisso sempre oppure istantaneamente) la velocità del centro di massa sarò $v_G=omegad_G$, dove d_G è la distanza del centro di massa dal punto O, inserendola nel teorema di Konig si ha:
$K=1/2I_Gomega^2+1/2M(omegad_G)^2=1/2(I_G+Md_G^2)omega^2=1/2I_Oomega^2$
Avendo sfruttato il fatto che $I_O=I_G+Md_G^2$ dal teorema di huygens-steiner.
Adesso mi è molto più chiaro! Grazie!

Ho dato un'occhiata a questo esercizio :
https://s22.postimg.cc/d623wao3z/ese.png?dl=1
la parte a) è semplice statica , non ci perdo tempo. Vediamo il resto. Supponiamo che il sistema sia in equilibrio con un certo angolo $theta_0$ tra asta e direzione verticale . Il filo viene tagliato , l'asta ruota con velocità angolare crescente .
Si domanda quanto vale la velocità angolare e la velocità del CM , quando l'asta passa per la posizione verticale.
Prendo come polo il perno Q . La distanza tra polo e CM vale : $ QG = l/4$ . Il momento di inerzia dell'asta rispetto al perno Q si trova con Huygens :
$I_Q = I_G + M*GQ^2 = 1/(12)Ml^2 + 1/(16) Ml^2 = 7/(48)Ml^2 $
Il baricentro G , quando l'asta ruota di $theta_0$ , si abbassa di $l/4(1-costheta_0)$ .
Per la conservazione dell'energia , la diminuzione di energia potenziale dev'essere uguale all'aumento di energia cinetica :
$Mgl/4(1-costheta_0 ) = 1/2I_Q omega_f^2 $
dove $omega_f$ è la velocità angolare nella posizione verticale . Facendo i conti risulta :
$omega_f^2 = (24)/7g/l(1-costheta_0)$
e quindi la velocità di $G$ è : $v_G = omega_f*QG = sqrt( (3gl)/(14)(1-costheta_0)) $
Come vedi, non ci sono problemi a prendere come polo il perno Q . Nel foglio allegato, ho indicato semplicemente l'angolo come $theta$ e la velocità angolare finale come $omega$ :
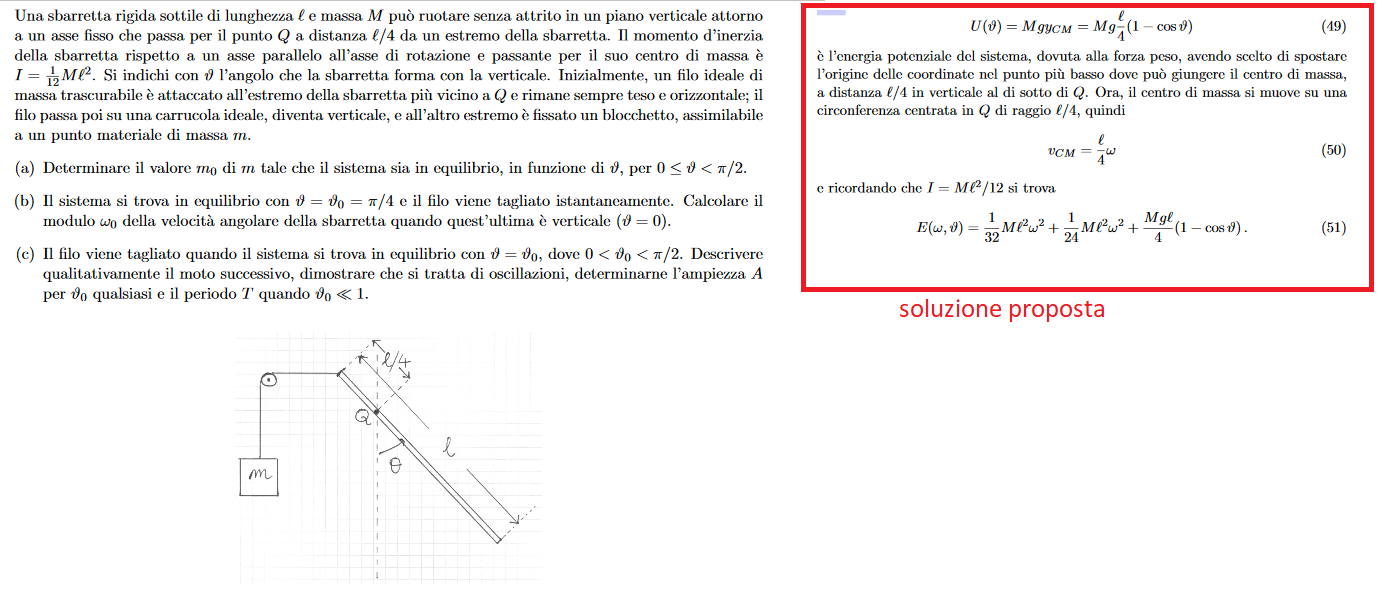
Per quanto riguarda la "soluzione proposta" che hai allegato , ti faccio notare che determina l'energia totale , cinetica più potenziale, nel riferimento che ha precisato all'inizio , come somma dell'energia potenziale prima detta, ma per un angolo $theta$ generico : $Mgl/4(1-costheta)$ , e dell'energia cinetica rotazionale , che presenta come somma di due termini :
1) il termine $1/(24)Ml^2omega^2$ è l'energia cinetica relativa a G , poiché il momento di inerzia rispetto al CM è uguale a $1/(12) Ml^2$
2) il termine $1/(32)Ml^2omega^2$ è l'energia cinetica dovuta al termine di trasporto del momento di inerzia.
Nota che ora la velocità angolare è generica, non è quella massima prima determinata.
In altri termini , poiché l'asta ruota attorno a Q , si ha :
$I_Q = I_G + M*GQ^2 $
e pertanto :
$E_k = 1/2 (I_G + M*GQ^2) omega^2 = 1/2(1/(12) Ml^2 + 1/(16)Ml^2) omega^2$
È chiaro?
PS : ho visto che Vulplasir è diventato molto carino e ti ha dato una esauriente spiegazione. Bene!
https://s22.postimg.cc/d623wao3z/ese.png?dl=1
la parte a) è semplice statica , non ci perdo tempo. Vediamo il resto. Supponiamo che il sistema sia in equilibrio con un certo angolo $theta_0$ tra asta e direzione verticale . Il filo viene tagliato , l'asta ruota con velocità angolare crescente .
Si domanda quanto vale la velocità angolare e la velocità del CM , quando l'asta passa per la posizione verticale.
Prendo come polo il perno Q . La distanza tra polo e CM vale : $ QG = l/4$ . Il momento di inerzia dell'asta rispetto al perno Q si trova con Huygens :
$I_Q = I_G + M*GQ^2 = 1/(12)Ml^2 + 1/(16) Ml^2 = 7/(48)Ml^2 $
Il baricentro G , quando l'asta ruota di $theta_0$ , si abbassa di $l/4(1-costheta_0)$ .
Per la conservazione dell'energia , la diminuzione di energia potenziale dev'essere uguale all'aumento di energia cinetica :
$Mgl/4(1-costheta_0 ) = 1/2I_Q omega_f^2 $
dove $omega_f$ è la velocità angolare nella posizione verticale . Facendo i conti risulta :
$omega_f^2 = (24)/7g/l(1-costheta_0)$
e quindi la velocità di $G$ è : $v_G = omega_f*QG = sqrt( (3gl)/(14)(1-costheta_0)) $
Come vedi, non ci sono problemi a prendere come polo il perno Q . Nel foglio allegato, ho indicato semplicemente l'angolo come $theta$ e la velocità angolare finale come $omega$ :

Per quanto riguarda la "soluzione proposta" che hai allegato , ti faccio notare che determina l'energia totale , cinetica più potenziale, nel riferimento che ha precisato all'inizio , come somma dell'energia potenziale prima detta, ma per un angolo $theta$ generico : $Mgl/4(1-costheta)$ , e dell'energia cinetica rotazionale , che presenta come somma di due termini :
1) il termine $1/(24)Ml^2omega^2$ è l'energia cinetica relativa a G , poiché il momento di inerzia rispetto al CM è uguale a $1/(12) Ml^2$
2) il termine $1/(32)Ml^2omega^2$ è l'energia cinetica dovuta al termine di trasporto del momento di inerzia.
Nota che ora la velocità angolare è generica, non è quella massima prima determinata.
In altri termini , poiché l'asta ruota attorno a Q , si ha :
$I_Q = I_G + M*GQ^2 $
e pertanto :
$E_k = 1/2 (I_G + M*GQ^2) omega^2 = 1/2(1/(12) Ml^2 + 1/(16)Ml^2) omega^2$
È chiaro?
PS : ho visto che Vulplasir è diventato molto carino e ti ha dato una esauriente spiegazione. Bene!

 Accedi a tutti gli appunti
Accedi a tutti gli appunti
 Tutor AI: studia meglio e in meno tempo
Tutor AI: studia meglio e in meno tempo
{kind=link}